Next-Generation Rotary-Wing Flight Controls
Rotary-wing flight control simulation poses unique challenges that go far beyond those of fixed-wing systems.
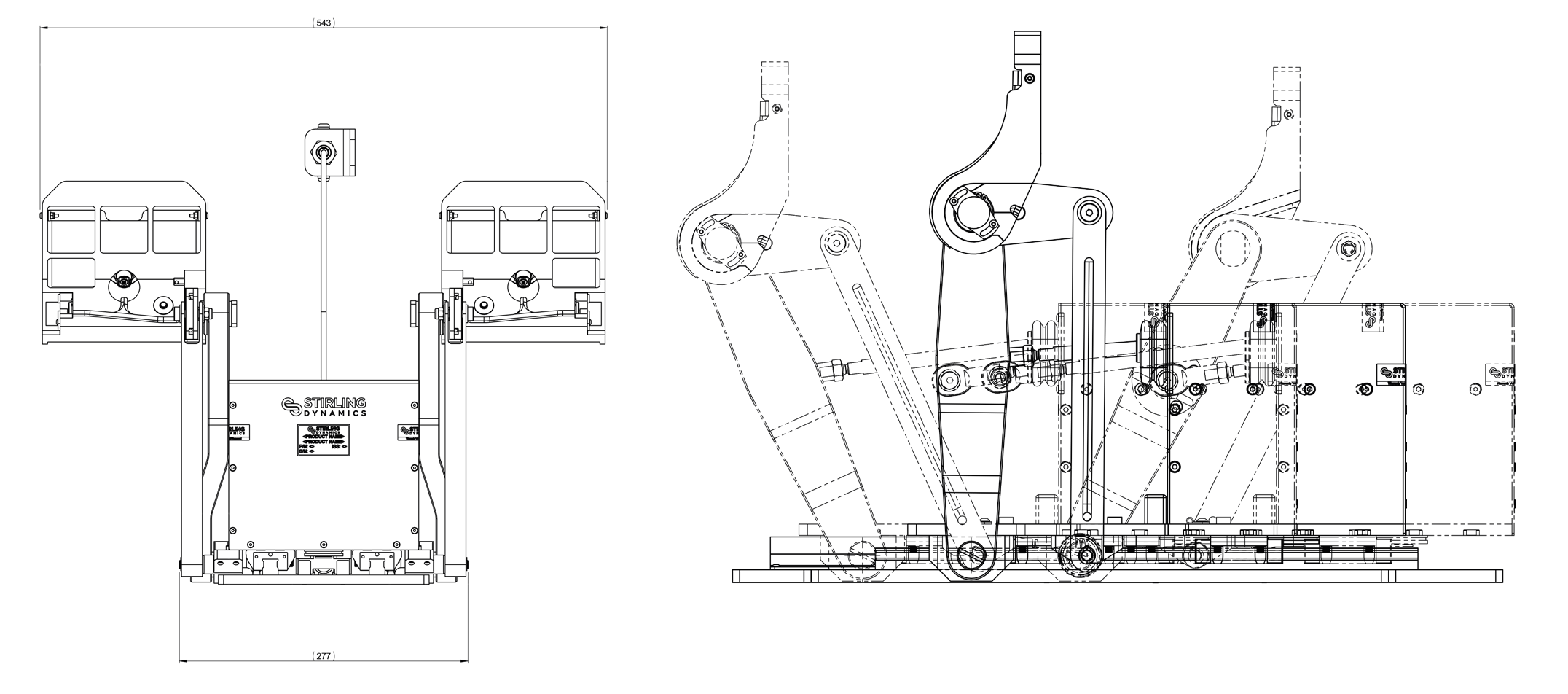
Helicopter simulator controls – the cyclic, collective and anti-torque pedals – demand extraordinary precision, very low friction and finely tuned force cues to reproduce the delicate control and coordination required for rotary-wing flight.
Stirling Dynamics designs and manufactures advanced helicopter simulator controls for a wide range of rotary-wing aircraft including the CH-47 Chinook, the UH-60 Blackhawk and the CH-53K King Stallion.
Our new Version 4 cyclics, collectives and pedals offer the exceptional levels of realism and immersion needed to deliver the superior training outputs and high levels of airmanship required from helicopter pilots.
![]()
Unique Challenges of Rotary-Wing Flight Simulation
Unlike fixed-wing aircraft, a helicopter is dynamically unstable and relies on continuous pilot input to maintain controlled flight.
Each control axis – cyclic, collective and pedals – interacts in a non-linear way with the others. The pilot must manage a highly coupled dynamic system through tactile and visual feedback.
Consequently, the control inceptors in a simulator must reproduce not only the geometry and forces of the real controls but also the high-bandwidth feedback characteristics of the rotor and control linkages.
Precision controls are critical to realism and immersion. If cues are inaccurate, pilots develop incorrect motor skills or fail to transfer handling techniques effectively to the aircraft.

High mechanical transparency
Minimal friction and inertia allow subtle inputs – crucial for hovering and low-speed handling.
Accurate dynamic response
Precise modelling of rotor-head dynamics and control coupling ensures correct handling cues.

Consistent control loading
Repeatable forces create standardised training conditions across sessions and students.





Why Stirling Dynamics
Stirling Dynamics (an Expleo company) is a world-class innovator that pioneered active pilot controls for rotary-wing aircraft in the early 1990s. Our new Version 4 solutions make us the trusted leader in flight controls for advanced helicopter simulators.
We design and manufacture all our rotary-wing flight controls at our premises in Bristol, UK. Our full bespoke service gives the customer complete choice in control specifications. Grips are specific to aircraft types: we offer a range of grips to suit different applications (in addition to our standard COTS grip).
Expleo is a €1.4 billion group comprising 18,000 innovation-driven experts in 29 countries. It is trusted around the world by brands including Airbus, Dassault Aviation and Spirit Aerosystems.
![]()